

Ερευνητές στη Γερμανία δημιούργησαν ένα μικροσκοπικό ρομπότ, το οποίο δεν είναι μεγαλύτερο απο 300 χιλιοστά και όταν το κοιτάζει κανείς μοιάζει με μια μικρή ελαστική ταινία. Μετά, αρχίζει να κινείται.
Το μικροσκοπικό αυτό ρομπότ, με το ανεπίσημο μέχρι στιγμής όνομα Millirobot, περπατά, πηδάει, σέρνεται, ρολάρει και κολυμπά. Ακόμη, μπορεί να βγαίνει από ένα υδατικό περιβάλλον σε ένα ξηρό, με μεγάλη ευκολία. Αυτό το πρωτότυπο μοντέλο ρομπότ είναι αρκετά μικρό για να μετακινηθεί εύκολα σε ένα στομάχι ή στο ουροποιητικό σύστημα, δήλωσε ο Metin Sitti, επικεφαλής του τμήματος Φυσικής Νοημοσύνης στο Ινστιτούτο Max Planck για Ευφυή Συστήματα στη Στουτγάρδη της Γερμανίας, ο οποίος ηγείται της ερευνητικής ομάδας.
Το ρομπότ δεν έχει ακόμη δοκιμαστεί στον άνθρωπο, αλλά ο στόχος είναι να βελτιωθεί για ιατρική χρήση - για παράδειγμα, η μεταφορά και παράδοση φαρμάκων σε ένα "δύσκολο" σημείο εντός του ανθρώπινου σώματος.
Το πιο ασυνήθιστο για την έρευνα, δήλωσε ο Δρ. Sitti, είναι ότι ένα τέτοιο «μινιμαλιστικό ρομπότ» μπορεί να επιτύχει «όλους τους διαφορετικούς τύπους δυνατοτήτων κίνησης και πλοήγησης μέσα σε ιδιαίτερα πολύπλοκα περιβάλλοντα». Το εύρος των συμπεριφορών αλλά και των δυνατοτήτων του μικροσκοπικού ρομπότ είναι σίγουρα εντυπωσιακό και θέτει αυτό τον μικρό ήρωα εκτός συναγωνισμού από όλους τους άλλους που έχουν κατασκευαστεί μέχρι σήμερα.
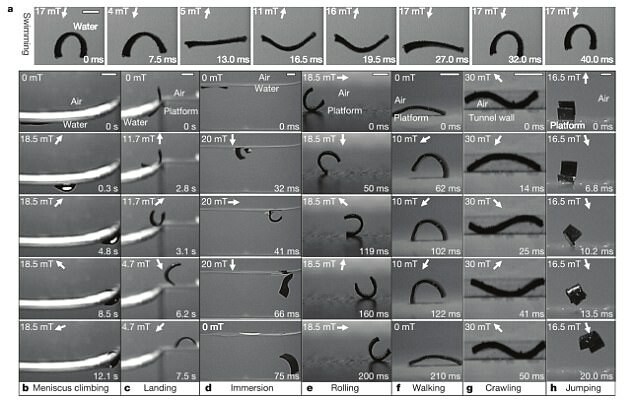
Το ρομπότ είναι κατασκευασμένο από ελαστομερές ελαστικό, το οποίο είναι γεμάτο με πολλά μαγνητικά, μικρά σωματίδια. Προγραμματίζουμε, από έξω, τις μαγνητικές ιδιότητες αυτών των σωματιδίων έτσι ώστε, όταν εφαρμόζουμε ένα μαγνητικό πεδίο, το ελαστικό ρομπότ να αλλάζει το σχήμα του σε οτιδήποτε θέλουν οι ερευνητές. Έτσι μπορεί να κάνει όλες αυτές τις διαφορετικές κινήσεις, με αποτέλεσμα όταν το κοιτάζει κανείς να σέρνεται ή να πηδάει, μοιάζει πραγματικά με ένα αλλόκοτο ζωντανό πλάσμα.
Όπως είπαμε ένας από τους σημερινούς βασικούς στόχους των ερευνητών είναι να τοποθετήσουν αυτό το μικροσκοπικό μαλακό ρομπότ στο πεπτικό μας σύστημα ή στο ουροποιητικό σύστημα - και στο μέλλον, στο αγγειακό σύστημα - και για να μπορέσουμε να περιηγηθείμε σε όλους αυτούς τους πολύπλοκους ιστούς. Σύμφωνα νε τους ερευνητές, το μικρότερες κατευθυνόμενες ιατρικές συσκευές που χρησιμοποιούνται ευρέως σήμερα, είναι οι καθετήρες, οι οποίοι έχουν διάμετρο ένα χιλιοστό, αλλά είναι πάντοτε δεμένοι σε μια κατάληξή τους. Έτσι, ο βασικός στόχος είναι να δημιουργήσουν μικροσκοπικά ρομπότ που θα κατευθύνονται, αυτόνομα, σε περιοχές που είναι δύσκολες να φτάσουν τα σημερινά ιατρικά όργανα.
Τα ρομπότ αυτά στη σημερινή τους μορφή είναι αρκετά μικρά για το πεπτικό μας σύστημα και το ουροποιητικό σύστημα. Οι δημιουργοί του, θέλουν να πάνε μικρότερες, ακόμα και κάτω από δεκάδες microns, ώστε να φτάσουν σχεδόν οπουδήποτε μέσα στο σώμα μας.



























σχόλια